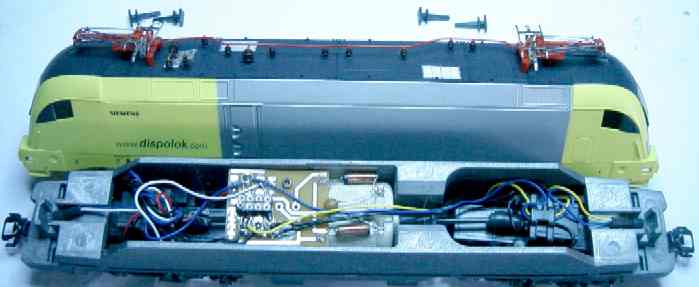
Als ich das Gehäuse der Lok
öffnete ( .. einfach die Puffer ziehen ..) war ich sichtlich überrascht.
Da
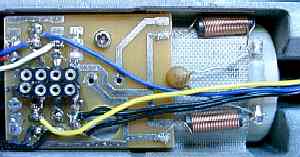
war doch tatsächlich eine Anschlussplatine zu sehen, auf denen sich die komplette Leiterbahnführung für den Einbau der Schnittstellenbuchsen befand,
nur von den Buchsen war leider nichts zu sehen, außer dass dort, wo diese
dann üblicherweise sitzen mich 8 kleine Löcher in der Platine anlachten.
PIKO hatte es doch tatsächlich geschafft, die für den komfortablen Decoder-Umbau
benötigte Schnittstellenbuchse einfach nicht einzubauen. Der eingebaute ANDI-Decoder
war ohne Schnittstellenstecker, nur mit seinen Anschlussdrähten auf der
Platine verlötet.
Es ist schon kaum sinnvoll nachvollziehbar, was diese Art der
Kosteinsparung im Produktionsprozess soll.
Da ich aber einen ESU-Lokpiloten als Decoder - der standardmäßig mit
Schnittstellenstecker geliefert wird - einbauen wollte, besorgte ich mir im
Elektronikfachhandel einige kleine passenden Buchsenleisten, die man in die
Leiterplatten einlöten kann. Dieser Aufwand - finde ich - musste sein, damit
ich den "Lopi" nicht noch "verunstalten" muss.
Der eigentliche Umbau beschränkte sich somit auf:
- Einlöten der Schnittstellen-Buchse :
Dazu wird zunächst der ANDI-Decoder entfernt ( ... und "auf
Halde" gelegt, man weiß ja nie )
Die notwendigen Aussparungen und Bohrungen für die DSS-Buchse befinden sich
bereits auf der Anschlussplatine, so dass diese Sache wirklich schnell
erledigt ist.
- Digitalisierung
Als Decoder habe ich einen preiswerten ESU-Multiprotokoll-Lokpiloten
Typ 51600 eingebaut. Den braucht man nur mit seinem Schnittstellenstecker in die
nun vorbereitete Schnittstellenbuchse der Lokomotive zu stecken. Sollte die
Lichtfunktion über F0 nicht richtig funktionieren, dann muss der Stecker
nochmals herausgenommen werden und um 180 ° gedreht werden.
Bei dem anschließenden Fahrtest überzeugte die "neue" Lok durch
geregelten Lauf und - Dank der 2 angetriebenen Drehgestelle- auch mit
guten Zugkräften.
- Decoder-Einstellung
Da mit den Standard-Einstellungen sowohl das Lauf- als auch das
Regelungsverhalten nicht optimal waren, habe ich ein wenig an den
Parametern des Lopi "gespielt".
Folgende Einstellungen haben sich als gut erwiesen:
CV-1 [Lokadresse} 01 ... 128 z.B. 65
CV-2 {Anfahrspannung] 02
CV-3 {Beschleunigung] 05
CV-4 {Bremswirkung] 05
CV-5 {Höchstgeschwindigkeit] 32 ~ 230 km/h
CV-6 {Mittengeschwindigkeit] 14 ~ 115 km/h
CV 51 {Regelung I] 56
CV 52 {Regelung II] 10
CV-53 {Regelung III] 10
|